
今天在辦公室進行書本的三校,突然院助理拿了一盒東西進來,打開來一本是新買的四軸飛行器。一看到這東西那管的了什麼三校,馬上拆開來組。(記錄下過程以供學生參考)

先組主體旋翼

秒組

鎖上飛行擴充板、飛行底板、Audino Nano

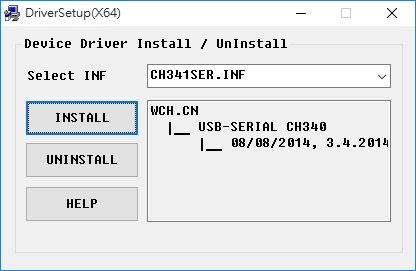
安裝燒錄驅動程式
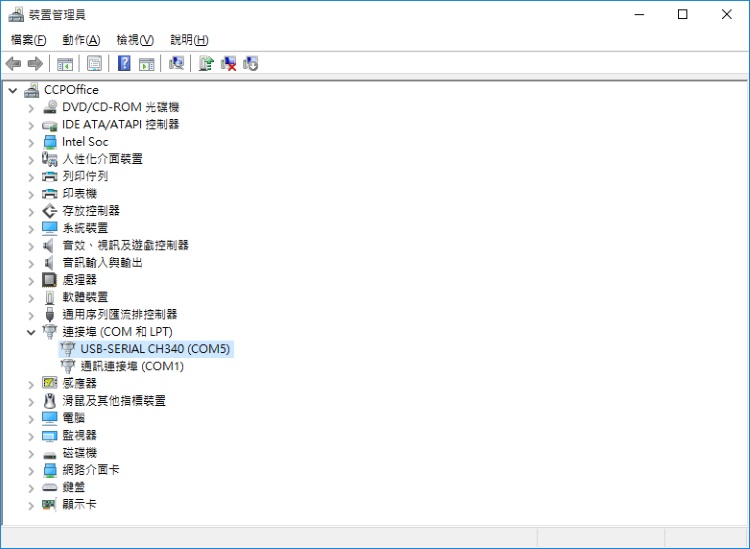
成功安裝後,硬體連上電腦後,會出現在裝置管理員裡
把程式燒錄進去Arduino Nano中

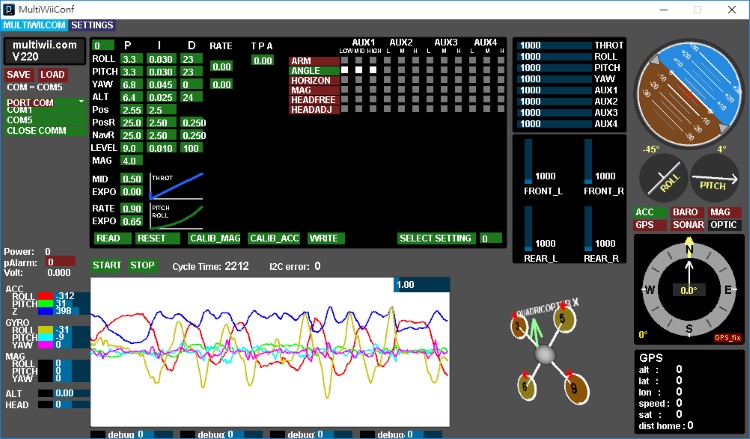
檢查相關四軸飛行器參數
裝好APP,到辦公室外測試飛行

測試飛行的結果並不理想,因為離地滯高時機體會有自體旋轉的狀況出現,似乎是某一軸的馬達有問題,已跟廠商連絡等待解決方案

會選擇這一款四軸飛行器是因為它的主要元件是Arduino Nano,之前有很多利用Arduino開發物聯網應用的經驗,加上我有很多各式的感測器,將來可以讓學生加裝上去,去做一些四軸飛行器的創意發想應用
