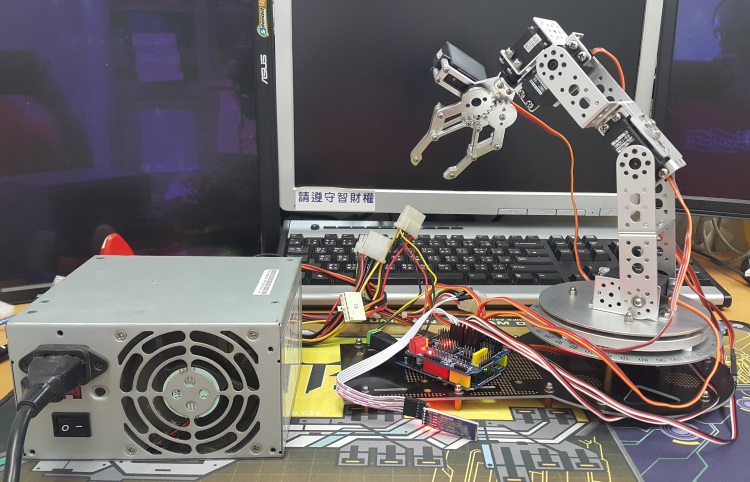
這隻六軸機械臂在我的文章中出現好幾次了,但都還沒有以它做主角過,今天要做一個簡單的範例,就是利用手機透過藍牙,來控制機械臂上的六個伺服馬達。其實在之前的肌電與伺服馬達的應用就想用肌電感測器去偵器手部肌肉的活動狀況,進而控制機械臂的活動。不過那時有一個狀況,就是一般Arduino上若沒有特別的外加電源,它原本的輸出,連機械臂上的一棵RB-150MG都驅動不了,所以這次拆了一棵電腦的Power來做動力來源(還特別選了一棵有開關的,方便開關電)。

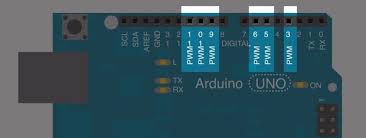
由於伺服馬達需要使用Pulse Width Modulation (PWM,脈衝寬度調變)來控制其位置角度,Arduino的digital pin有些編號旁有 "~" 符號,這些 pin 就是可以使用 PWM pin
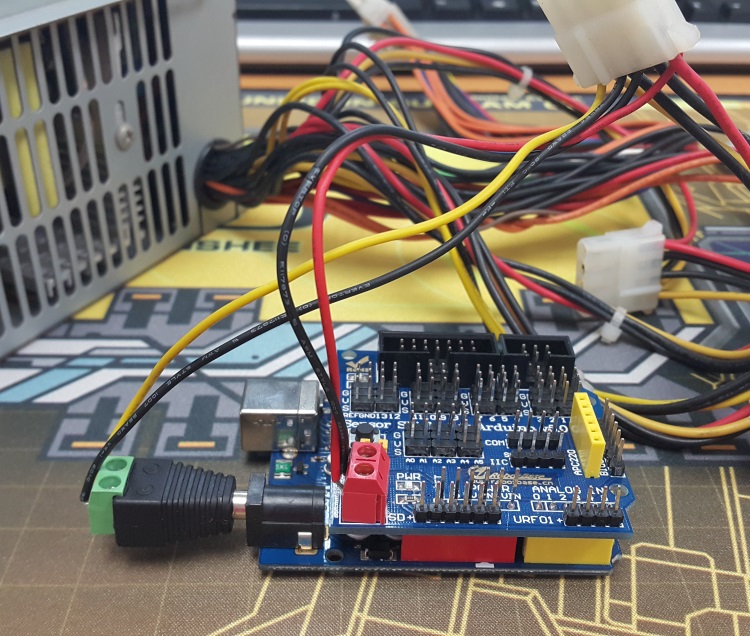
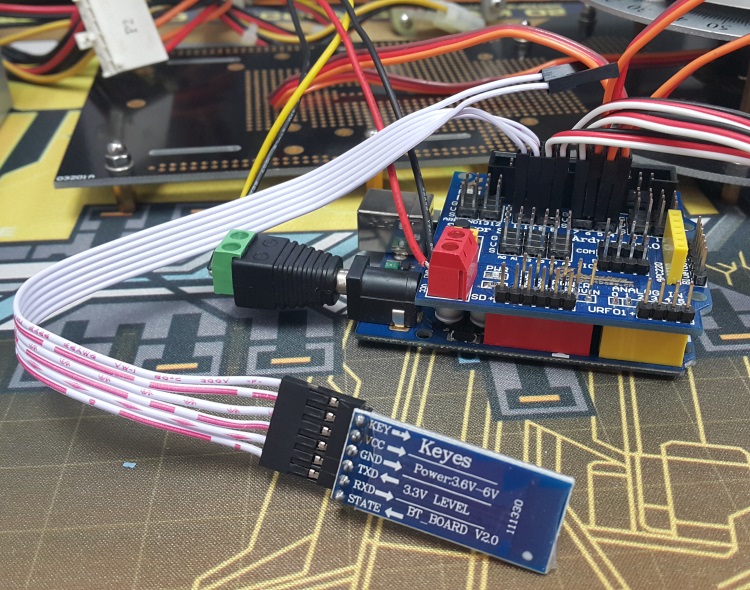
為了方便接外接電源,我是在Arduino上加了一塊擴充卡Sensor Shield for Arduino v5.0,這張卡好像是每個digital pin都是PWM pin(不確定),從Power接線出來接上
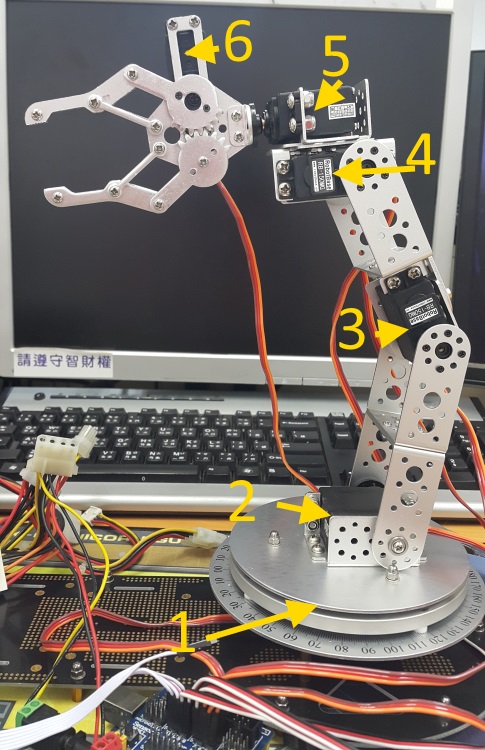
今天的主角六軸機械臂,三兩下把它接到Arduino上
由於是要用手機透過藍牙來控制,所以把藍牙晶片也裝上
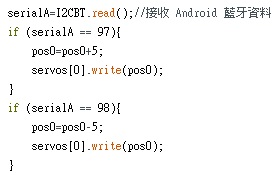
在手臂端程式碼的部分,基本上跟肌電與伺服馬達的應用中的差不多,不過在這一個範例中需要對每一個伺服馬達做控制,所以我在手機端送資料到Arduino後會對特定伺服馬達增加或減少轉動角度(程式類似底下的片段)
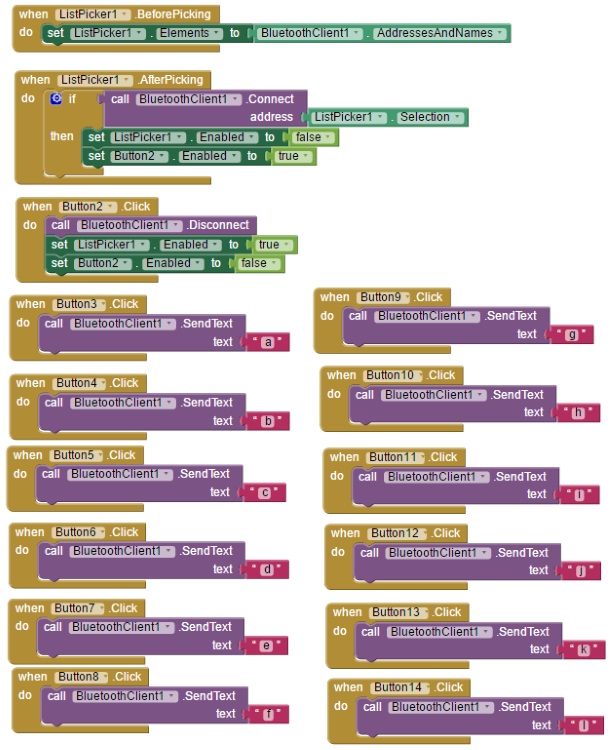
接下是手機端的程式,單純只是藍牙連線送出文字
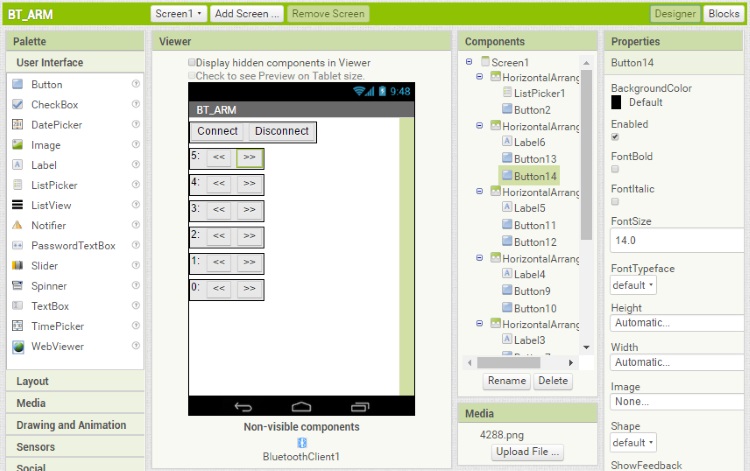
把APP放到手機後就可以用六軸機械臂夾夾樂了(0:~5:分別對應1~6的伺服馬達)

做完了,我好棒!
