從小我就很愛看機器人的卡通,心裡總是幻想自己會坐在機器人的駕駛倉中,像動畫的主角一樣,利用兩隻操縱桿與兩個腳踏板,就可以控制機器人與怪獸格鬥。

隨著自己年齡漸漸增長,累積了各方面的專業知識,發現只用兩隻操縱桿與兩個腳踏板根本沒辦法去控制機器人去做太複雜的動作,吼,卡通都騙人!

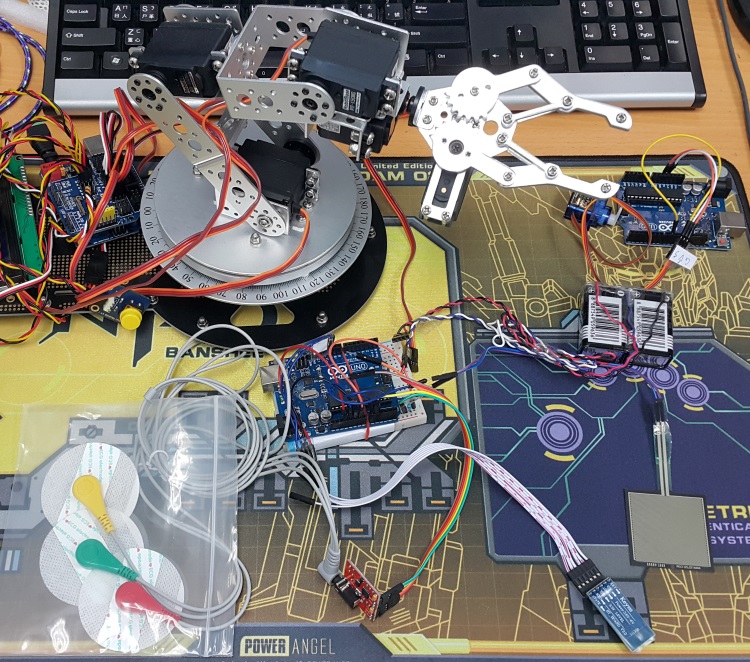
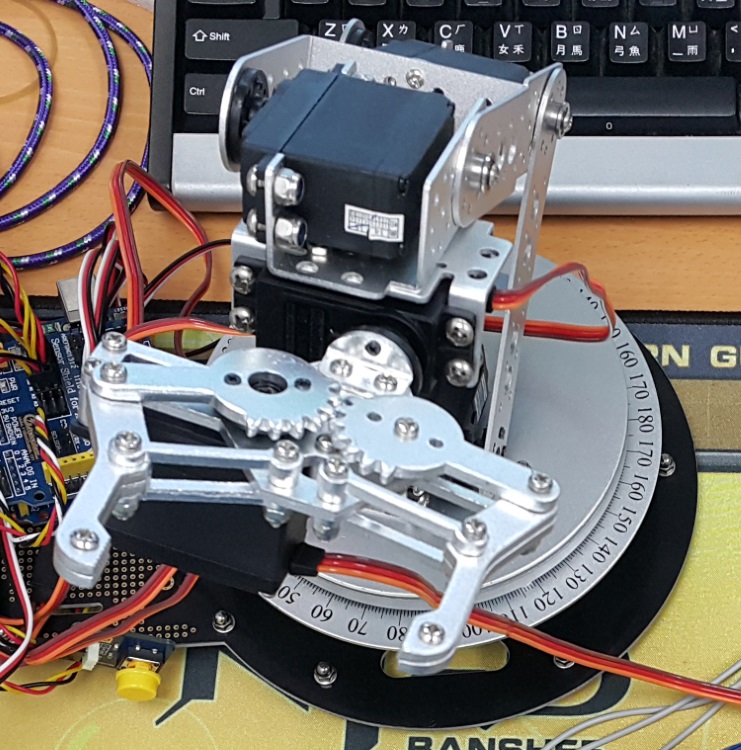
在前天所做的範例中"肌電感測的應用",利用肌電感測器去偵器手部肌肉的活動狀況。想像一個情境,若是有一個人沒有手掌,應該可以用肌電的訊號去控制機械的手掌進行抓握的動作,想到這一點,馬上去實驗室拿出6DOF機械臂。
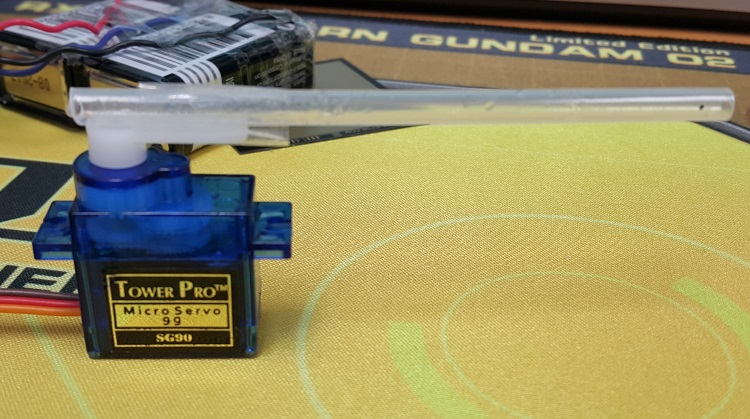
拿出超小伺服馬達接到上次裝好的肌電偵測系統
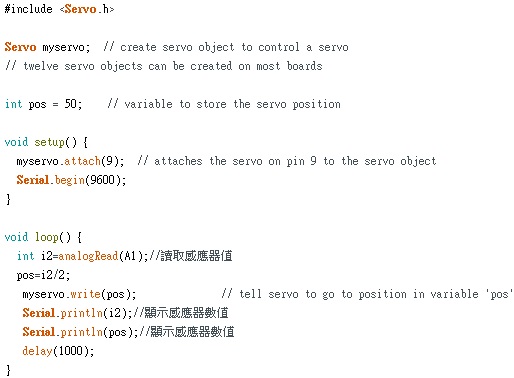
在Arduino寫一個簡單的測試程式
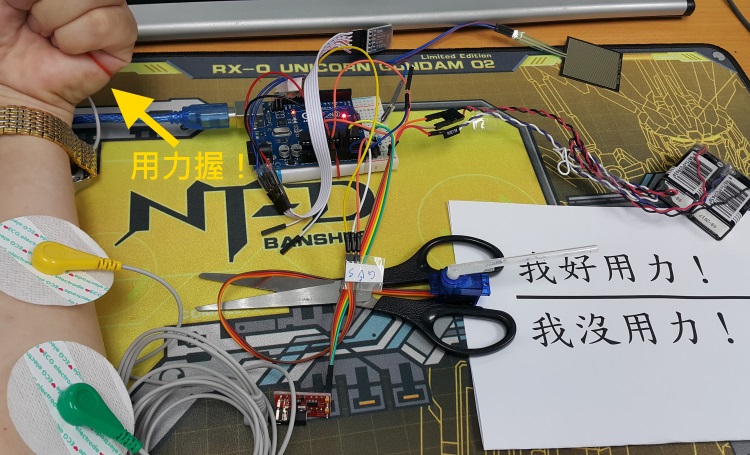
把電極貼片黏貼上手臂測試,理論上每一條肌肉必須貼上成對的電極貼片,兩電極相距大約3公分,接上正極與負極導線,也要找一處肌肉纖維稀少的地方貼上一個電極貼片,並且接上接地導線。不過我發現我不大能把電極貼片貼到適當的位置上,果然做任何事相關的基本知識是很重要。

在手掌放鬆的狀況下,伺服馬達會轉到"我沒用力!"的區塊

在手掌用力握的狀況下,上臂的肌電感測會偵測到較大的數值,伺服馬達會轉到"我好用力!"的區塊
在測試成功後,準備接上我的6DOF機械臂,進行肌電控制機械爪抓與放的動作。不過接好線後發現,Arduino輸出電流太小,沒辦法驅動機械臂上的伺服馬達,需要另外接電源才行。一想到還要再去接電源我立馬放棄(超級懶惰鬼!),呵呵呵,反正我已經完成了利用肌電去控制超小伺服馬達了,証明這的確是可行的想法(我想一些可控制的義肢應該都是使用這樣的原理吧!)
