
我在上資安的課程中,上到災難復原計畫時,我常會提醒同學,不管是自然災害、恐怖活動或各種突發事故,災害一定會發生,所以一定要安排相對應的處理方案。在一些災難發生時,一些危險區域,救災人員在尚未確定相關的狀況下,若冒然進入可能會危及生命安全,這時探險偵測機器人就可以派上用場了。
今天做的這一個例子是無線遠端影像監控的延伸應用,主要是要將上次的無線影像裝置放於移動的載具上,既然是移動的裝置,就必須為他準備電源,我是使用六棵充電電池

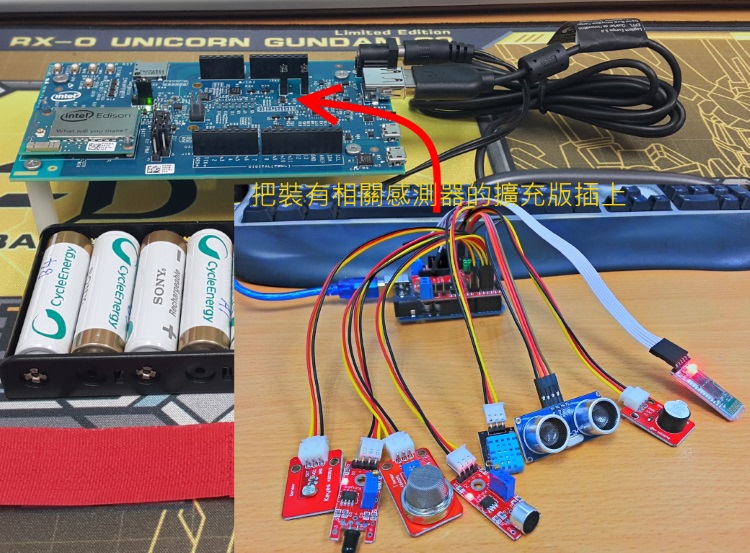
若是需要偵測各式的環境參數的感測器,例如光敏電阻、火焰感測、煙霧感測、聲音感測、溫濕度感測、距離感測等,可將我在居家環境參數偵測裝有各式感測器的擴充板,加到Intel Edison上,不過今天沒有要搞到這麼複雜
利用魔鬼沾將電池、Intel Edison與Logitech C310綁在一起

接下來拿出我用於上國中學生技職教育體驗學習課程的樂高機器人,做為樂高探險車的載具

利用繩子把兩者結合在一起(呵呵呵,橡皮筋、透明膠帶、魔鬼沾與繩子是我的好朋友)

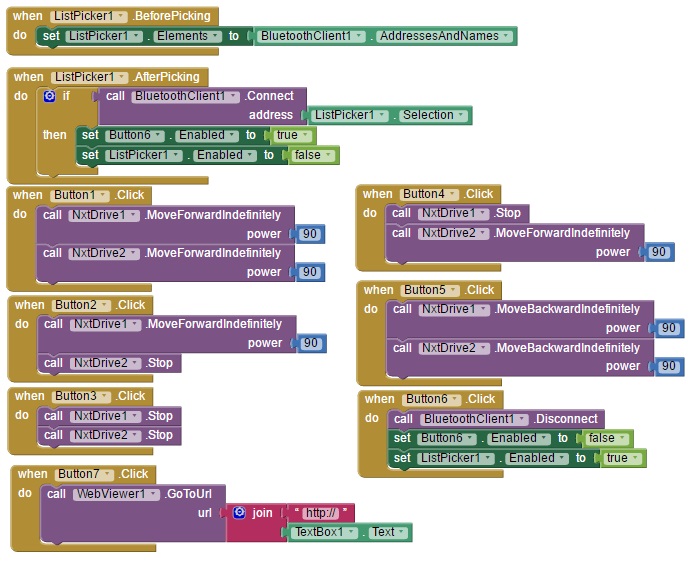
在手機APP的部分,也是利用我在樂高機器人體驗學習課程中寫的簡易控制程式,加上一個WebViewer,用來傳回Intel Edison傳回來的即時影像

搞定程式,啟動Intel Edison、樂高機器人,開始去偷看裙底風光(同學說:老師,很抱歉,我今天穿牛仔褲,咦~~~~~~)
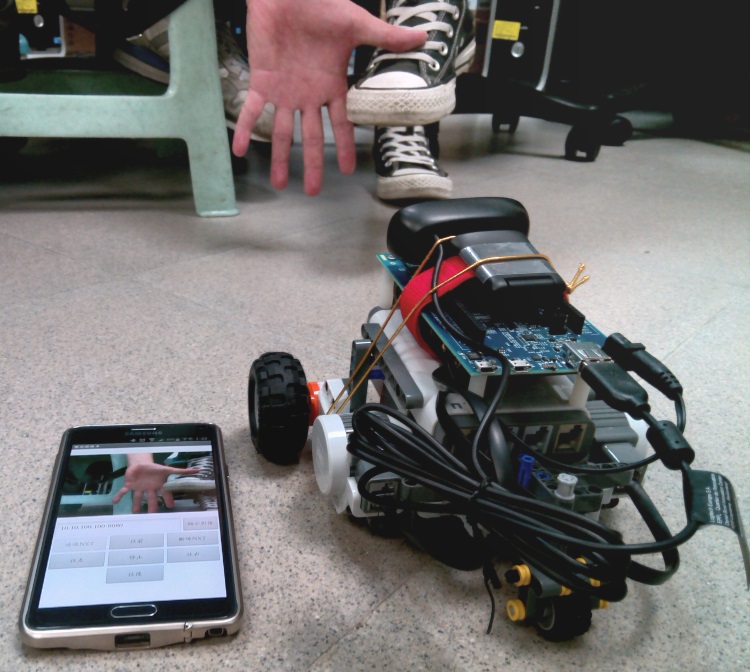
手機上的畫面

又做完了
