自從機器手臂技術開始發展,在1980年代機器手臂已成功的應用於汽車製造業等產業,在機械人技術領域是應用範圍最廣泛的自動化機械裝置,而許多工業危險之組裝、噴漆、焊接、高溫鑄鍛等繁重工作,皆能以機器手臂取代人工作業。目前機械手臂在機器人技術領域中得到最廣泛實際應用的自動化機械裝置,除了主要用於工業製造上,商業農業、醫療救援、娛樂服務、軍事保全甚至在太空探索等領域都可以發現其應用裝置。(Wiki)

最近在網路上的一篇文章"機器人大軍來了!你的工作在哪裡?"中看到:機器人產業勃興,部分低階勞力工作職缺將消失,但會新增哪些人力需求?由於機器人可說是「會移動的電腦」,需要機械、電子零件的高度整合,因此模組研發人員、程式設計人員需求將激增。機器人需要撰寫程式、設計嵌入型系統、測試最適材質、研發各式零組件,但最重要的仍是機電系統整合,因此最歡迎跨領域人才,否則僅從一種專業的視野進行考量,未能全面思考,將很難融入機器人產業團隊。
既然機器人(機器手臂)是近年來的趨勢,所以當然也要讓學生開始玩這一方面的東西,有別於某些學校科系喜歡買現成的東西,改改參數或外觀就拿去比賽的作法,我比較喜歡讓學生完全自己動手組合、撰寫程式,發揮創意去完成想像中的東西。

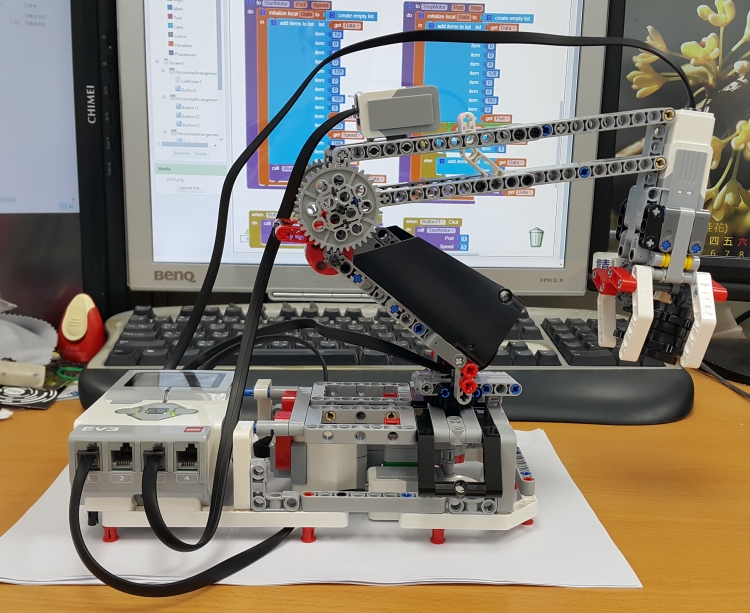
最近要求學生組合了簡單的機器手臂與自動顏色分類器,雖然我忙著在寫東西(有一種怎麼都寫不完的感覺),但看到學生們在組合,內心中的機器魂也是騷動不已。下午終於忍不住,把學生組好的機器手臂拿來玩了一下。這個機器手臂,學生有利用EV3随機附的編寫程式,寫入可於定點A抓取物體放到定點B的程序了,而我想要做的是要利用行動裝置去控制機器手臂上的三個馬達,完成不特定點抓取物體與放置物體的動作(類似夾娃娃機)

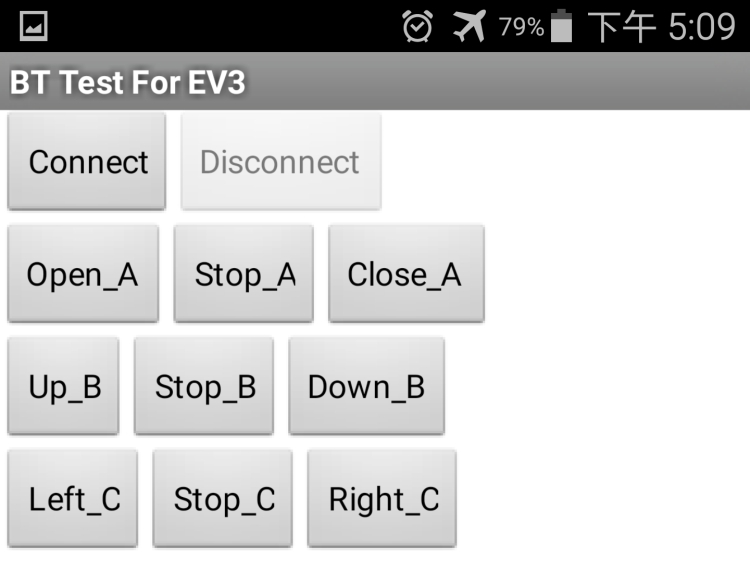
程式的設計很單純,藍牙的連線,三個馬達的正反向轉動(機器手臂的夾子開放、手臂上下運動與左右轉向)
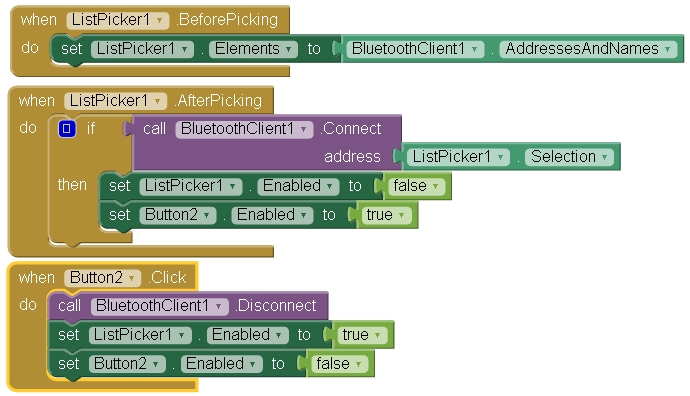
在藍牙的連線部分,之前的文章中有介紹很多次了,有興趣可以自行去看
EV3這組套件不像NXT在APP Inventor中有預設好的物件可以使用,這意味著所有動作的細節都必須自己來控制,這一點是令我相當害怕的,像之前某甘姓教授給我一棵E牌的心律感測器,希望我能從裡面抓取資訊,但由於我完全找不到相關的規格資料,所以一點也沒辦法寫相關的程式。而生產EV3的LEGO其實也沒有公佈其藍牙通訊的相關規格,但是網路上有些高手由一些原始檔中,解析出了EV3藍牙通訊的資料格式,這些人真是超強!

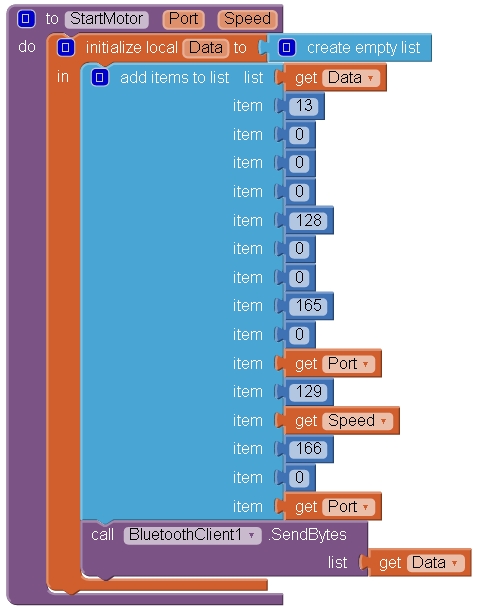
由於每天有跑三點半(接瑋瑋)的壓力,所以今天下午只是測試馬達的控制方式,主要是有兩個重要的指令,一是指定那一個PORT的馬達,用多少動力正轉或逆轉(Speed)
一個是指定那一個PORT的馬達動力完全關閉
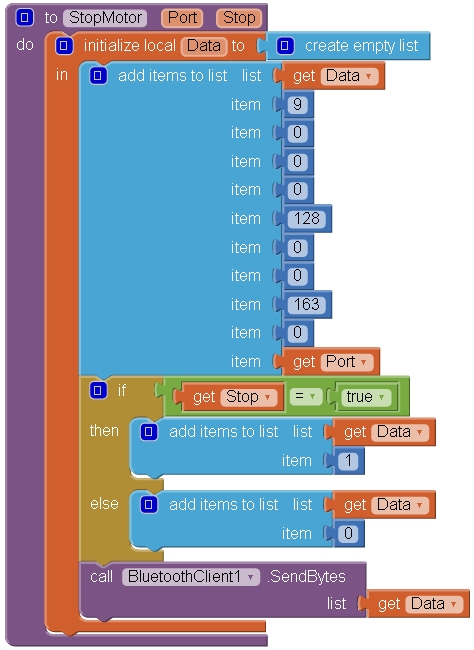
經過測試若是使用馬達動力完全關閉的指令,馬達會變成軟趴趴,可以隨意用手去扭動,要是用指定動力的方式把它數值指定為0的話,則馬達固定不動,也沒辦法用手去扳動,感覺這個方式機器臂比較穩定,所以程式裡都是使用動力值為0的方式來停止運動
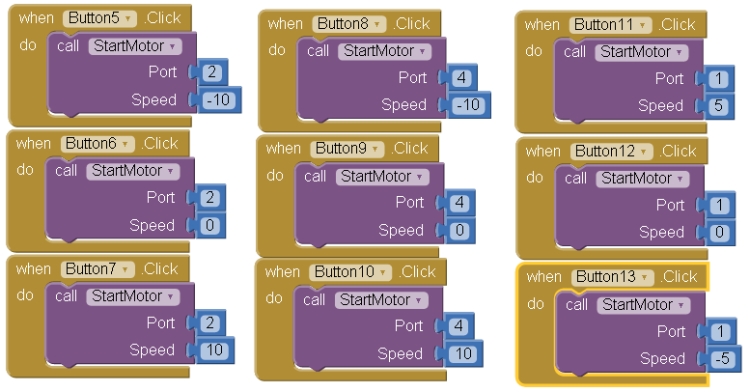
有一點要注意的是,A馬達的的PORT=1,B馬達的的PORT=2,C馬達的的PORT=4,D馬達的的PORT=8,我一開始被一篇文章誤導,因為它上面寫A馬達1,B馬達2,C馬達3,D馬達4,結果我一用手機控制,機器臂就給我亂亂動了
嘿嘿,可以用行動裝置控制機器臂的動作了,下次來試試EV3各式Sensor數值的抓取,以便未來做更進階的應用